

 QQ
QQ
在工业机器人的整个寿命周期内,除了例行保养外,更换编码器及电机也是常见故障之一,今天我们就ABB机器人更换单轴电机后如何校零展开。
ABB机器人电机编码器使用的是单圈***值编码器,即编码器能反应电机在一圈内的位置,超过一圈后的圈数则由SMB板记录;如果现场机器人仅更换了一个轴的电机,在没有校准工具的前提下,可以通过如下简易方法进行零位找回。
具体操作步骤如下:
在没有更换电机前(平时,零点准确),可以用机器人工具对准工装上某个尖点,并做程序记录该位置(或者例如弧焊程序、点焊程序、抓取或搬运程序等,可以针对某关键位置记录——标记点);
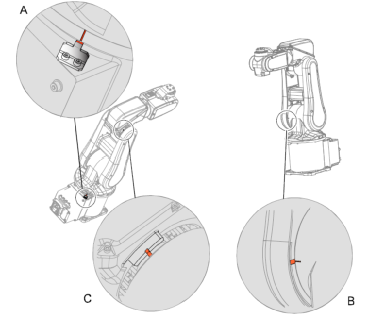
在更换电机后,把机器人该关节移动到刻度位置附近,进行转数计数器更新;
此时运行机器人程序到步骤“1”记录的点,由于更换了电机,机器人TCP无法走到原来的标准对准点;
查看此时该轴joint数据并记录,例如89°;
手动调整该轴(注意:只能动该轴),因为理论上所有的误差来自该轴。将机器人末端工具重新对准标准点;
查看此时的机器人该轴joint数据,例如89.3°;
计算步骤“6”和步骤“4”的差值,并移动该轴到差值位置(假设机器人该轴静角准位置是0),即例如按照步骤“6”和步骤“4”,移动该轴到0.3°位置;
进入示教器,点击“校准”-“精校准”,对该轴当前位置进行精校准。点击按钮后,该轴当前位置变化为0;
完成单轴的简易零位校准。
按照以上操作基础的问题都可以解决,如遇到解决不了的问题可以联系我们人员,详细沟通。
 了解更多点击:ABB工业机器人配件专营
了解更多点击:ABB工业机器人配件专营

了解更多点击:ABB工业机器人配件专营